Fig. 1. Different parts of the pipeline: (a) Detection of the unknown gap using active vision and TS2P algorithm (cyan highlight shows the path followed for obtaining multiple images for detection), (b) Sequence of quadrotor passing through the unknown gap using visual servoing based control. The blue and green highlights represent the tracked foreground and background regions respectively.
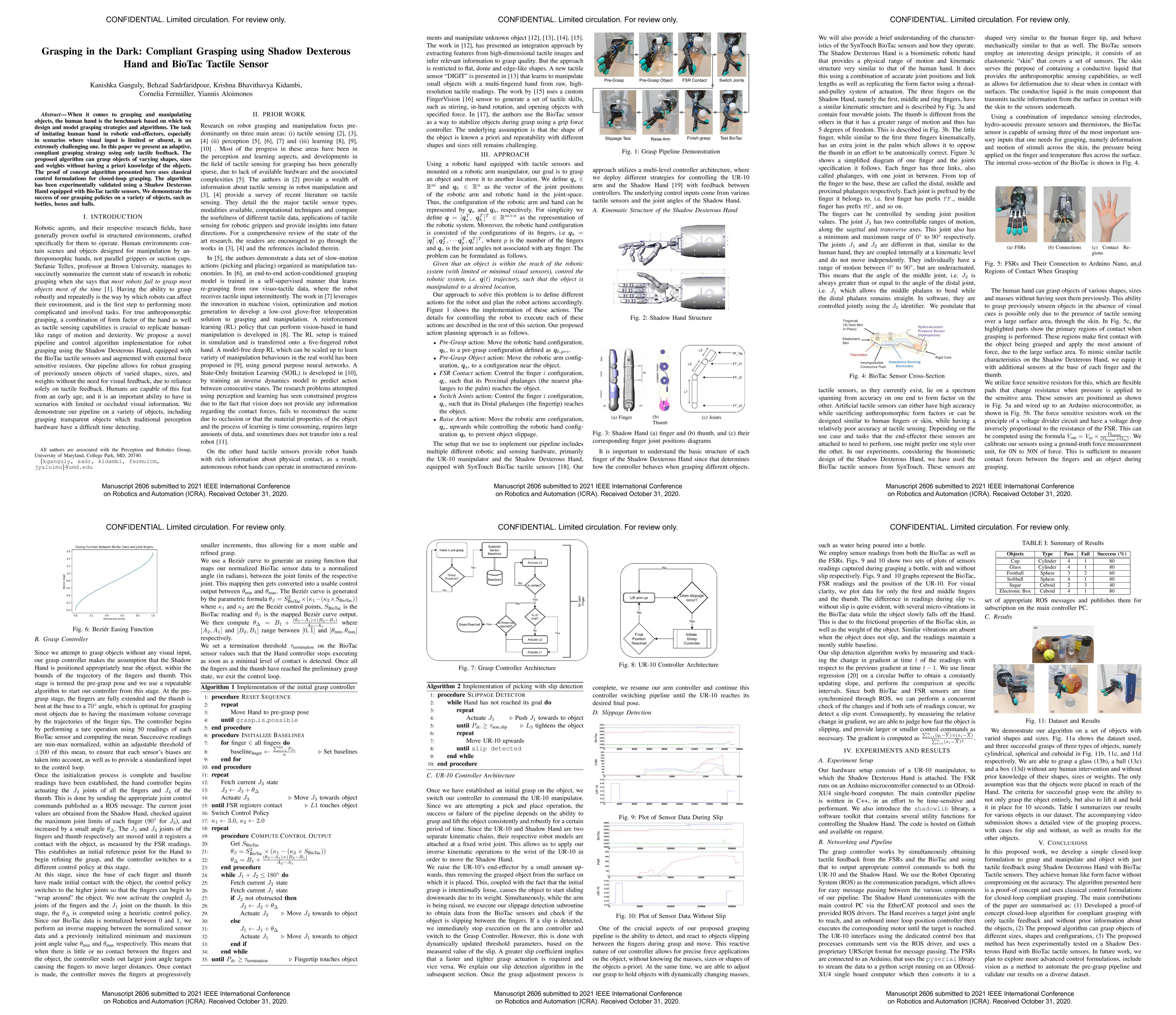
When it comes to grasping and manipulating objects, the human hand is the benchmark based on which we design and model grasping strategies and algorithms. The task of imitating human hand in robotic end-effectors, especially in scenarios where visual input is limited or absent, is an extremely challenging one. In this paper we present an adaptive, compliant grasping strategy using only tactile feedback.
The proposed algorithm can grasp objects of varying shapes, sizes and weights without having a priori knowledge of the objects. The proof of concept algorithm presented here uses classical control formulations for closed-loop grasping. The algorithm has been experimentally validated using a Shadow Dexterous Hand equipped with BioTac tactile sensors. We demonstrate the success of our grasping policies on a variety of objects, such as bottles, boxes and balls.