Istituto Italiano di Tecnologia, Genova, Italy DIBRIS, Universit`a di Genova, Genoa, Italy
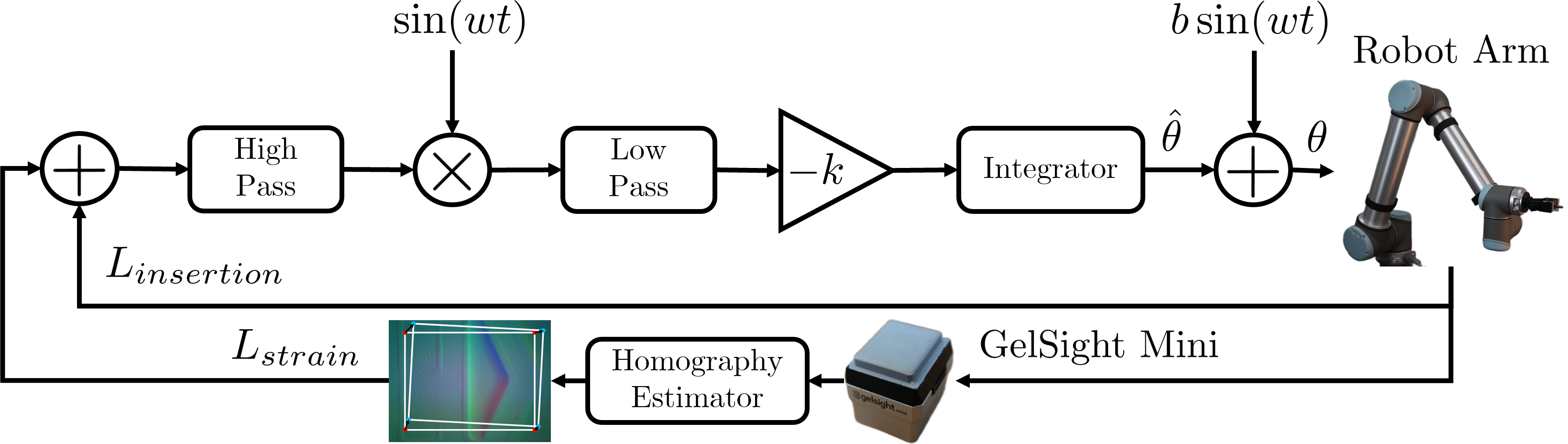
The extremum seeking controlled pipeline for wiggling-based tactile insertion. The instantaneous parameters theta control the pose of the tip of a key through a UR10 robot arm. The strain that the key exerts on the GelSight Mini's gel pad is observed via a displacement of the corners of a tracked patch in the sensor image feed, L_strain. The objective to be minimized is the sum of L_strain plus L_insertion, where L_insertion represents the depth of insertion into the lock. The extremum seeking control seeks to minimize the objective by adjusting the estimate of theta. As is standard in Extremum Seeking Control, theta is a modulated version of its estimate with each parameter modulated at a different frequency. The high pass filter removes the DC component from the objective signal, demodulation determines the slope of the objective's gradient, and the low pass filter averages the feedback signal with greater high-frequency attenuation than the integrator.
Abstract
When humans perform complex insertion tasks such as pushing a cup into a cupboard, routing a cable, or putting a key in a lock, they wiggle the object and adapt the process through tactile feedback. A similar robotic approach has not been developed. We study an extremum seeking control law that wiggles end effector pose to maximize insertion depth while minimizing strain measured by a GelSight Mini sensor. Evaluation is conducted on four keys featuring complex geometry and five assembly tasks featuring basic geometry.
On keys, the algorithm achieves 71% success rate over 120 trials with 6-DOF
perturbations, 84% over 240 trials with 1-DOF perturbations, and 75% over 40 trials initialized with vision. It significantly outperforms a baseline optimizer, CMA-ES, that replaces wiggling with random sampling. When tested on a state-of-the-art assembly benchmark featuring basic geometry, it achieves 98% over 50 vision-initialized trials. The benchmark's most similar baseline, which was trained on the objects, achieved 86%. These results, realized without contact modeling or learning, show that closed loop wiggling based on tactile feedback is a robust paradigm for robotic insertion.
Paper
Levi Burner, Pavan Mantripragada, Gabriele M. Caddeo, Lorenzo Natale, Cornelia Fermüller, Yiannis Aloimonos