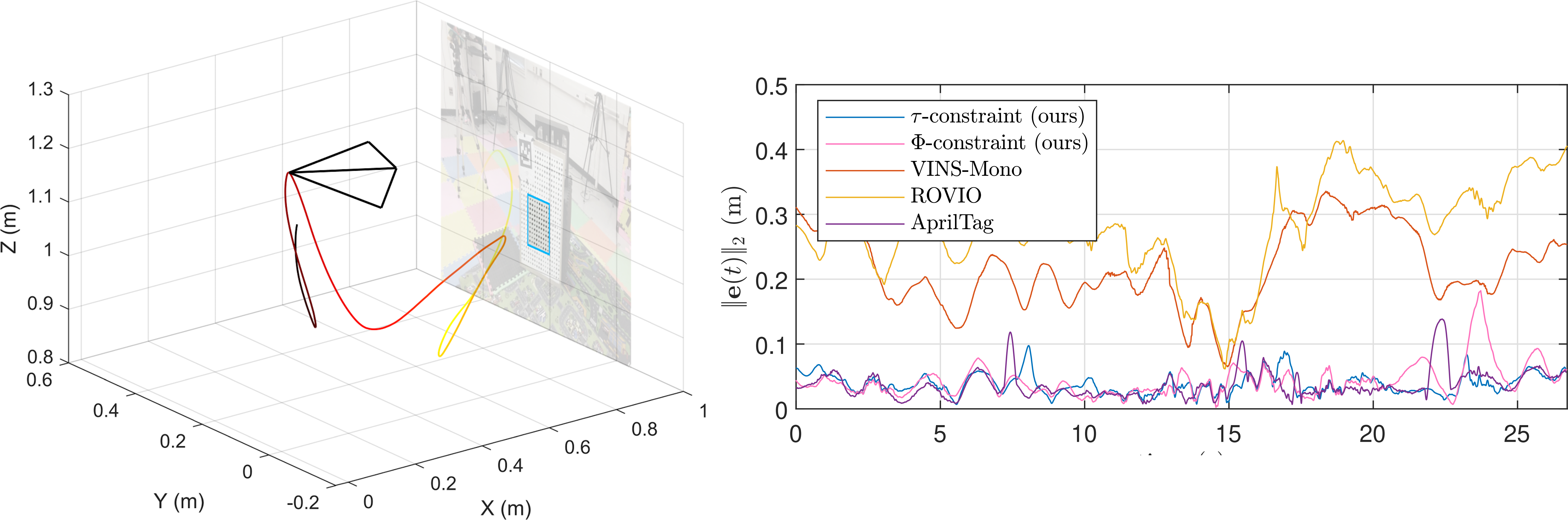
Fig. 1: Top: Five seconds of Sequence 9's camera trajectory along
with the fixated scene patch used to estimate 3D distance using a
monocular camera and an IMU. Bottom: l2 error for Sequence 9
of our methods as well as VINS-Mono, ROVIO, and AprilTag 3.
Time is color coded with the hot colormap.
Distance estimation from vision is fundamental for a myriad of robotic applications such as navigation, manipulation and planning. Inspired by the mammal's visual system, which gazes at specific objects, we develop two novel constraints involving time-to-contact, acceleration, and distance that we call the tau-constraint and Phi-constraint which allow an active (moving) camera to estimate depth efficiently and accurately while using only a small portion of the image.
We successfully validate the proposed constraints with two experiments. The first applies both constraints in a trajectory estimation task with a monocular camera and an Inertial Measurement Unit (IMU). Our methods achieve 30-70% less average trajectory error, while running 25x and 6.2x faster than the popular Visual-Inertial Odometry methods VINS-Mono and ROVIO respectively. The second experiment demonstrates that when the constraints are used for feedback with efference copies the resulting closed loop system's eigenvalues are invariant to scaling of the applied control signal. We believe these results indicate the tau and Phi constraint's potential as the basis of robust and efficient algorithms for a multitude of robotic applications.
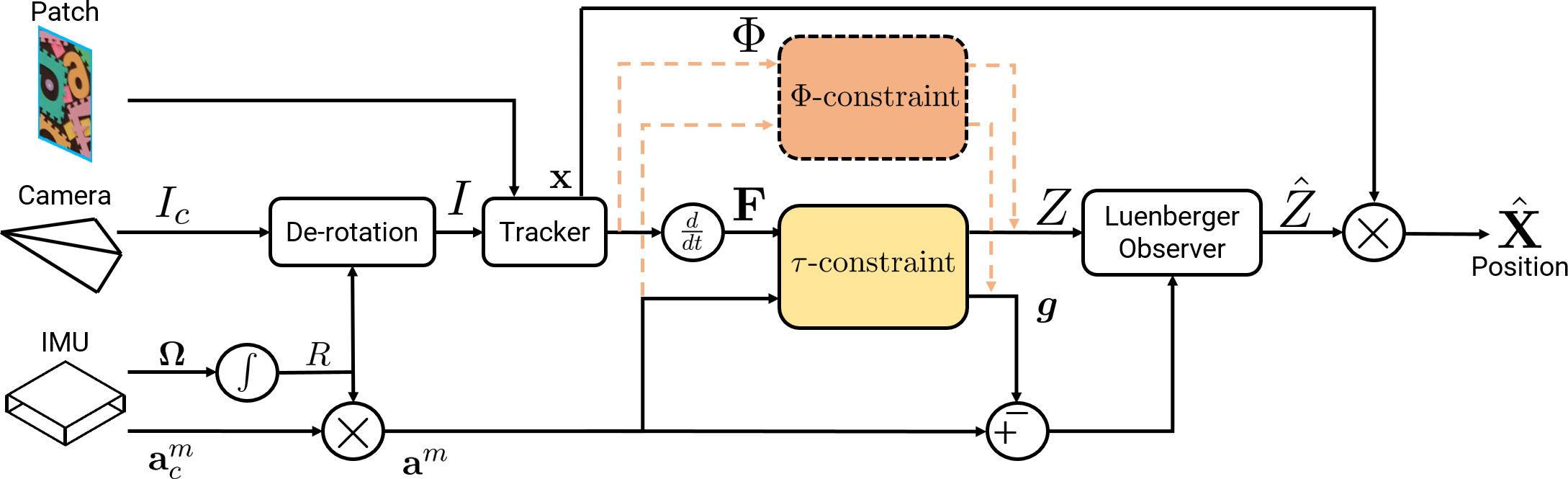
Figure 2. System overview of our method to estimate camera position using the tau-constraint. The Phi-constraint uses an identical process except that the derivative of Phi is not taken. Only one constraint is used at a time as indicated by the dashed arrows and outlines.