Unlocking Depth in Glass
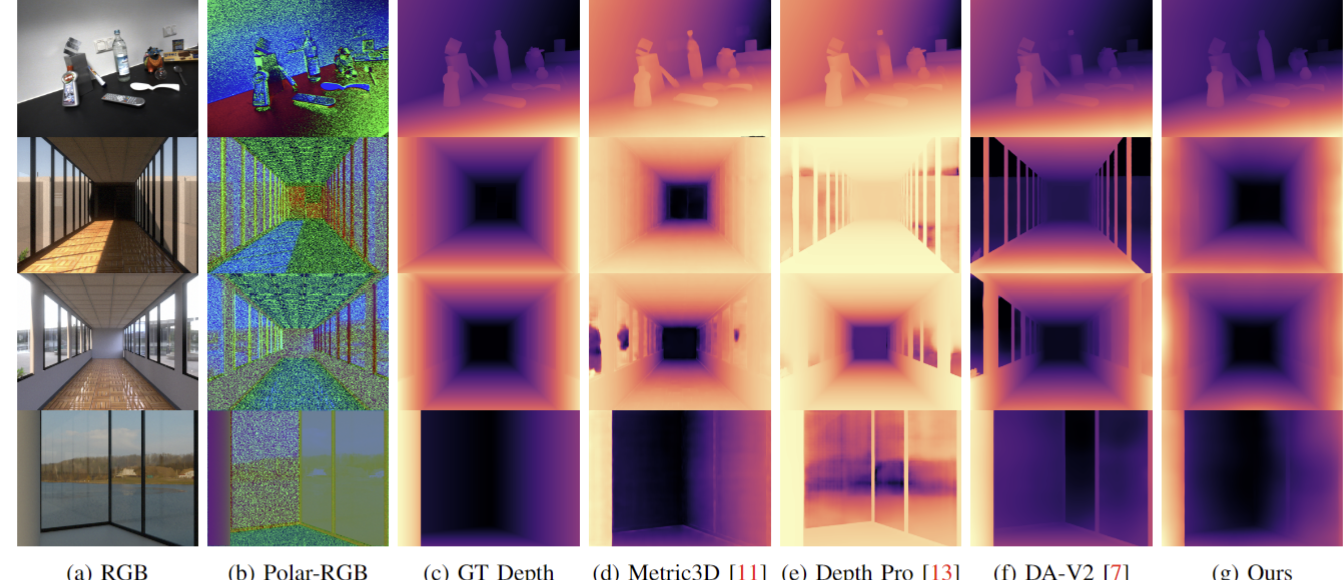
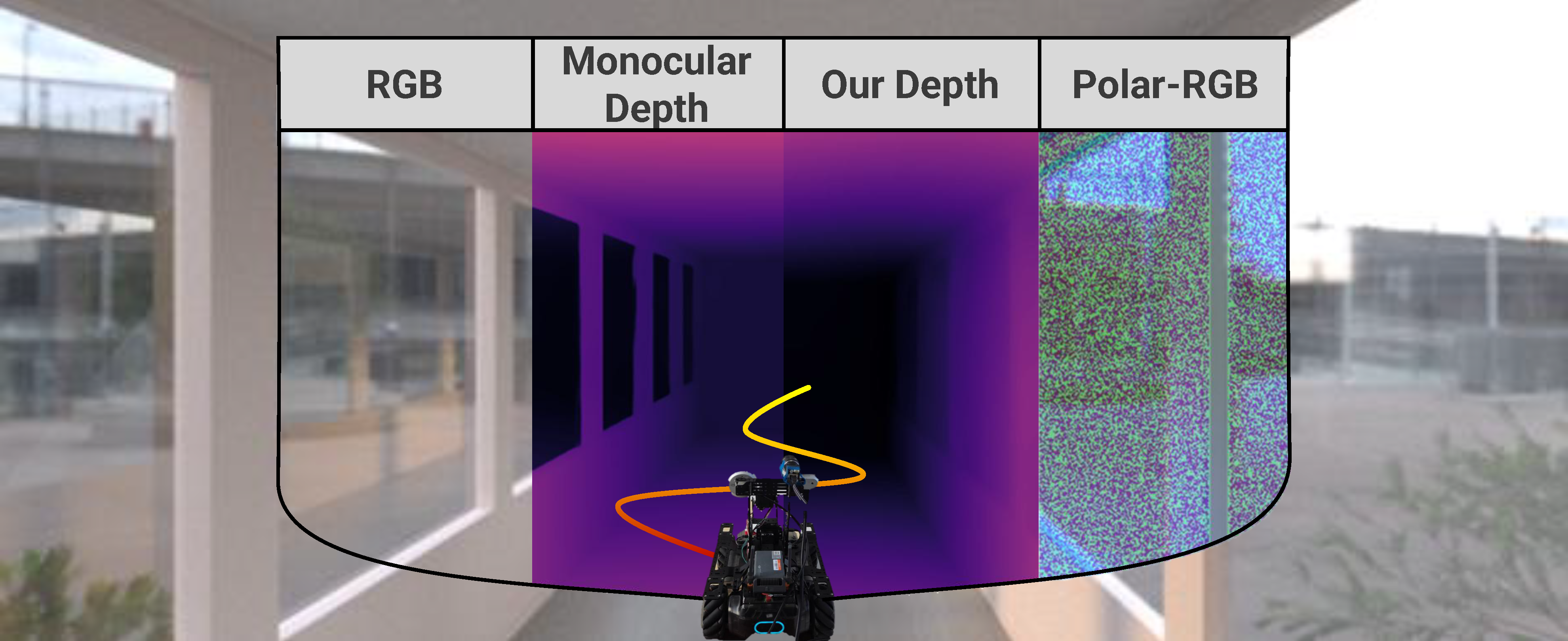
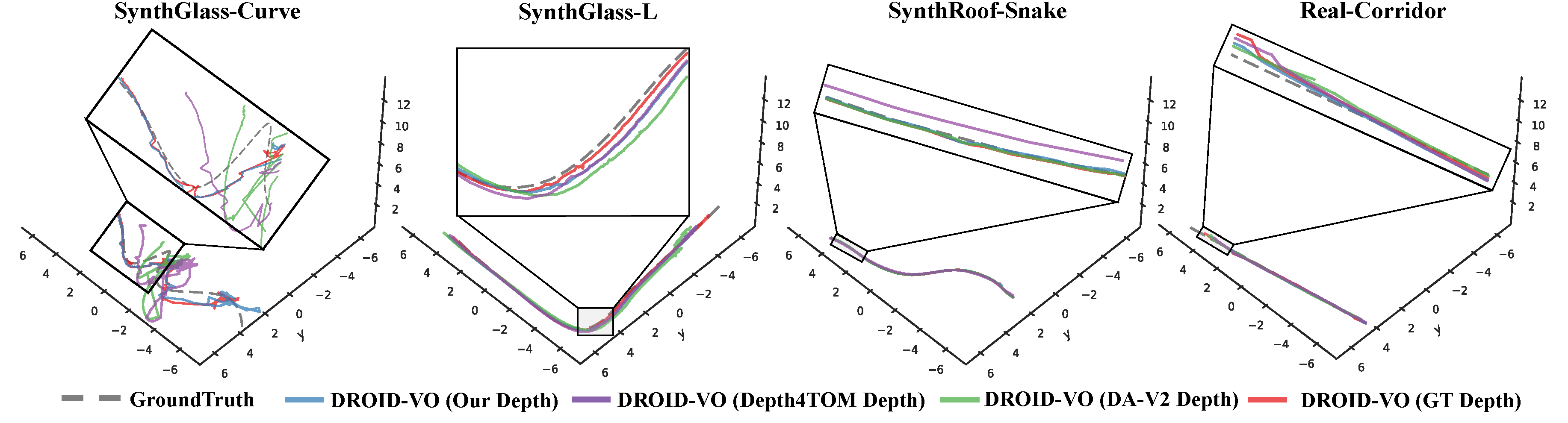
Glass surfaces remain challenging for indoor robot perception. Depth sensors and RGB-only monocular depth estimation often fail because of reflections, refractions, and low-texture regions. To this end, we present PolarDepth, a polarization-enhanced monocular depth framework for glass-dominant environments. We utilize a single polarization sensor to obtain a standard RGB image and a three-channel encoding of polarization cues, designed to be compatible with RGB-trained foundation depth models, and which we call Polar-RGB. This representation enables recovery of structure in transparent and specular regions where RGB cues are unreliable. We predict depth from both the RGB and Polar-RGB representations and fuse the predictions using a learned per-pixel reliability gate for mid-level fusion, highlighting RGB in diffuse regions and polarization on reflective surfaces. We demonstrate improvements in depth estimation and visual odometry performance over RGB-only baselines in glass-walled corridors on both real-world and synthetic data.
Using a polarization information for monocular depth estimation, we enhance odometry accuracy achieving state-of-the-art results on unseen datasets
@ARTICLE{10564186,
author={Naitri Rajyaguru, Tianfu Wang, Aryan Tajne, Botao He, Jiayi Wu, Cornellia Fermuller,Christopher Metzler, Yiannis Aloimonos},
journal={IEEE Robotics and Automation Letters},
title={PolarDepth: Polarization-Guided Monocular Depth for Visual Odometry},
year={2026},
doi={10.1109/LRA.2024.3416788}}